
Robot Eléphant Mantes en Yvelines
IUT de Mantes la Jolie

Notre Projet
Sur cette page, vous trouverez l'avancée anti-chronologique de notre projet : de la recherche d'idée de départ jusqu'à la soutenance et la course finale.
Début de montage
Voici notre bâti avec les différents éléments de notre transmission : courroie, cubes aux quatre coins du bâti pour fixer les pattes, paliers, support perceuse.

Maintien en posiition perceuse
La mise et maintien en position de la perceuse fut un point très important lors de la conception du robot. Lors du concours inter-IUT, la course entre les robots débutera à partir du moment où la perceuse est donnée aux équipe, ainsi il a fallut penser à un système rapide et précis pour mettre la perceuse en place. Ici nous avons donc créé deux moules à l’imprimante 3D qui épouse parfaitement l’ergonomie de la perceuse.

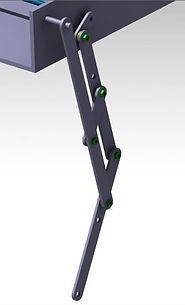
Pattes
Voici une de nos pattes entièrement assemblée !

Commande
Nous avons reçu cette semaine (semaine du 4 février) notre commande auprès de HPC comportant :
- 9 paliers
- 1 courroie
- 2 engrenages coniques
- 2 roues dentées

Usinage des Pieds
Nos pieds sont composés de deux pièces, un palet et un cylindre.
Le palet effectuera la liaison directe avec le sol, c’est l’appui plan que l’on a besoin pour la stabilité de notre robot. Celui-ci est réalisé en tournage. On a usiné un diamètre extérieur le plus large possible (en fonction des bruts disponibles, ici 90mm), et un chariotage intérieur pour le centrage du cylindre. Les deux pièces sont assemblées à l’aide d’une vis à tête fraisée.
Sur le cylindre, une rainure a été réalisée, sa position permet un débattement plus ou moins grand «du pied ».

Usinage des coussinets et entretoises :
Comme nous l’avons présenté précédemment, toutes nos liaisons pivots sont effectuées à l’aide de coussinets. Nous avons injecté dans un premier temps ces derniers à l’aide de la presse à injection, puis ceux-ci n’étant pas aux bonnes dimensions, nous les avons donc usinés sur un tour.
De la même manière, pour réaliser les entretoises qui vont nous permettre de mettre nos axes, nos renvois d’angles à bonne hauteur, nous les avons usinées en PVC sur un tour.
Conception Pieds :
L’une de nos plus grandes interrogations sur la réalisation du robot est la suivante: Va-t-il être équilibré, et va-t-il marcher droit ?
L’équilibre va se jouer sur la position du centre de gravité du robot lors de son déplacement. À l’arrêt nous avons pu constater que le centre de gravité de la perceuse sur la plaque était situé au niveau de la gâchette de cette dernière .De plus pour respecter le cahier des charges, le temps d’une patte au sol doit être <2/3 du temps et >1/10 du temps, c’est pourquoi la démarche de notre éléphant sera faite deux pattes par deux pattes en diagonale. Par conséquent le centre de gravité de notre système se déplacera selon les diagonales, ainsi un appui plan au sol le plus large possible est nécessaire pour que le robot tienne debout.
Soutenance de mi-projet :
Le 20 décembre, nous avons eu notre soutenance de mi-projet. Lors de celle-ci nous devions présenter devant un jury l’état d’avancement de notre robot. Les professeurs ont pus nous faire part de leurs différents avis, de leurs critiques comme de leurs encouragements. Les conseils que l’ont a pus recevoir, nous ont donc permis de répondre à nos incertitudes et nous conforter dans nos choix.
Usinage pattes :
Tout comme les liaisons pivots, avant d’avoir notre usinage définitif nous avons fabriqué différents prototypes. Nous avons commencé par découper les différentes bielles composants nos pattes à l’aide d’une presse à découper ; on s’est très vite aperçu que ce type d’usinage ne convenait pas, s’était beaucoup trop imprécis, les efforts de coupe étant trop importants pour de si petite pièce. C’est pourquoi nous avons encore opté pour l’usinage à commande numérique.
Ayant préparer (sur CATIA ) une plaque avec toutes nos bielles disposées dessus, ainsi que le programme qui correspondait , l’usinage sur la fraiseuse numérique était prêt à être lancé.
Pour réaliser nos bielles, nous avons utilisé une tôle d’aluminium d’épaisseur 3mm, puis suivis ces différentes étapes :
-Pointer
-Percer
-Tarauder la plaque martyre (pour le maintien en position)
-Visser chaque bielle
-Contourner chacune d’entre elles



Transmission :
La transmission est une étape clé dans ce projet. En effet il faut trouver un compromis : avoir une puissance suffisante pour que le système puisse aller le plus vite possible, sans que la puissance soit trop importante, au risque « d’arracher » tout le système.
Nous avons opté pour une transmission par courroie. Comme vous pouvez le voir sur la représentation 3D, nous utilisons un renvoi d’angle. Il est constitué de deux engrenages coniques (de rapport 1/1). Cela va nous permettre de transmettre le couple à l’axe avant. Nous obtenons le couple sur l’axe arrière à l’aide d’une courroie.


Liaisons pivots pattes :
Comme nous l’avons vu précédemment, les pattes de notre système sont composées de tiges articulées. L’usinage de ces tiges sera réalisé à l’aide de plaques d’aluminium. Les liaisons pivots quant à elles seront assurées par des coussinets préalablement injectés grâce à une presse à injection plastique. Ainsi, pour chaque liaison pivot du mécanisme, il y aura deux coussinets, une rondelle, ainsi qu’une vis/écrou usinée sur TCN.

Prototype :
Pour valider notre schéma cinématique 2D du mouvement des pattes, nous avons réalisé un premier prototype en mécano.
Comme vous pouvez le constater sur la vidéo ci-contre, la démarche biomimétique de l’éléphant peut être validée.
Cinématique :
Pour mettre en place mécaniquement la démarche de l’éléphant, nous avons donc :
dans un premier temps réalisé le schéma cinématique avec de simples tiges pour les os, et des liaisons pivots pour les articulations.
Puis dans un deuxième temps nous avons cherché un moyen permettant à la patte de se lever à partir d’un mouvement de rotation (perceuse), mais aussi créer un mouvement de poussée sur le sol en parallèle.
Le problème de transformation du mouvement, de rotation en mouvement de translation a été résolu par l’emploi d’un excentrique. En effet celui-ci permettra à chaque période (tour) d’effectuer un mouvement de patte (avant en arrière).
Une fois la cinématique réalisée, nous avons fait varier les différents paramètres de longueurs des bielles et de l’excentrique afin d’obtenir le meilleur compromis entre le biomimétisme et la distance parcourue..
Concept de l'éléphant :
La démarche de notre robot doit se rapprocher le plus de celle d’un éléphant.
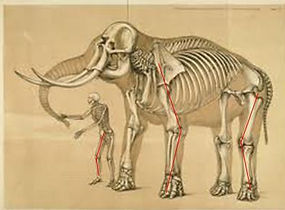
Aussi nous avons étudié l’ossature, la disposition des pattes de l’éléphant avant de avant de réfléchir à la réalisation du mécanisme à proprement parlé,
Dés lors nous avons observé (voir sur la photo ci-contre) que :
l’éléphant possède la même disposition des os et articulations que les humains, sur ses pattes arrières, mais une disposition « inversée » sur ses pattes avants : son genou est à l’envers.
Notre cinématique devra tenir compte de ce constat .
Idée retenue:
Nous avons repris nos recherches à zéro, en éliminant les mécanismes mimant le déplacement d'un crabe (6 pattes) ou d'une araignée (8 pattes). Nous voulions adopter une démarche innovante et réaliser un quadrupède, ainsi notre robot sera plus biomimétique.
L’idée étant la suivante : obtenir une ossature se rapprochant le plus possible d’un quadrupède, c'est-à-dire posséder une cuisse, un genou… Tout ce qui compose une patte de quadrupède.
Notre choix d’animal, c’est donc porté sur un ÉLÉPHANT !
En effet la démarche de l’éléphant est semblable au système voulu. D’autre part son image nous a parue intéressante pour adapter son aspect physique à notre robot.
Première idée:
Nos premières recherches, se sont orientées sur différents systèmes présents sur internet. On a pus ainsi voir toute sorte de mécanisme aussi différents les uns des autres.
Un de ces mécanismes a cependant retenu notre attention: RHEX
Ce système est sous forme d'un parallélépipède rectangle, composé de 6 pattes recourbées(en demie-cercle), ayant toujours 3 appuis au sol.
Nous avons donc listé les avantages et les inconvénients:
-une liaison moteur -pattes directe garantissant un bon rendement; une bonne stabilité.
Après une étude plus approfondie, nous nous sommes rendu compte, que la vitesse de rotation de chaque pattes n'étaient pas identiques. Il ne s'agit pas d'un déphasage de 60 degrés, mais de six moteurs indépendants, fournissant une vitesse de rotation non constante.
De plus la démarche de ce robot ne ressemelait à aucun animal.
Par conséquent nous avons abandonné cette idée.

La perceuse:
Le modèle de perceuse utilisé pour le fonctionnement de notre système est la suivante :
une perceuse sans fil , DEXTER 14,4 volts.


Gantt :
A l’aide du cahier des charges, transmis courant septembre, nous avons donc déterminé les différentes tâches à réaliser en tenant compte des contraintes présentées dans le CDC.
Une fois le travail réparti entre les membres de l’équipe, nous avons planifié notre projet et réaliser le Diagramme de Gantt ci-après.
Le diagramme nous permettra de suivre l’avancement de notre projet, de visualiser les écarts entre la prévision et la réalisation.

Cliquer sur la photo pour voir le Gantt en plus grand.
